The EU-funded TRA VISIONS Young Researcher Competition (YRC) is an academic contest showcasing the ground-breaking and novel developments of undergraduates and post-graduates, alongside early-stage professional researchers across the transport sector. Following successes in Warsaw (2016), Vienna (2018) and Helsinki (2020), last year’s competition congregated in Lisbon, Portugal at TRA2022.
Prospective applicants were asked to submit an initial abstract in either the Road, Rail, Waterborne or Cross-Modality theme track. Over three months of project development time, entrants expanded their proposals into a formalised project report, poster, presentation and pitch video. Subsequent scrutiny and appraisal from the judging panel returns the top 10 shortlisted projects per mode and the all exiting winner rankings.
The winners of TRA VISIONS YRC 2022 were announced at the opening ceremony of TRA2022 in Lisbon, Portugal by Rosalind Van Der Vlies, European Commission Director RTD C – Clean Planet. The sponsor of the Award was Europe’s Rail Joint Undertaking. Congratulations are extended to all mode winners, here in particular to the rail category winners, Markus Loidolt, Benjamin Smakic and Thomas McDonald.
Read on to find out more about the winners and their research!

TRA Visions YRC 2022 rail category winners: Benjamin Smakic (left), Thomas McDonald (middle) and Markus Loidolt (right).
First Prize: T-Vision: A Hybrid Subsurface Radar Inspection System for Intelligent Asset Management of Railway Tunnels by Thomas McDonald
 Name: Thomas McDonald
Name: Thomas McDonald
Position/Role: Post-Graduate Research Student
Affiliation: Newcastle University (UK) | Centre of Excellence for Mobility and Transport
Coordinator(s): Prof. Mark Robinson & Prof. GuiYun Tian
Email: t.mcdonald@ncl.ac.uk
Linked In: https://wwww.linkedin.com/in/tpwmcdonald
OCRID: https://orcid.org/0000-0002-9240-3186
 Submitted Work: T-Vision: A Hybrid Subsurface Radar Inspection System for Intelligent Asset Management of Railway Tunnels.
Submitted Work: T-Vision: A Hybrid Subsurface Radar Inspection System for Intelligent Asset Management of Railway Tunnels.
Placed: First Prize
Short Summary: Aging masonry railway tunnels are at ever increasing risk of accelerated structural degradation. Detection and localisation of concealed defects growing behind tunnel walls is paramount to inform predicative maintenance strategies, reduce tunnel closures and minimise network disruption. Problematically, current inspection technologies are slow, highly localised, suffer blind spots and convey subsurface topography unintuitively. This work develops and trails a pioneering hybrid rotational ground penetrating radar system to generate novel Crown-Raster and Hackle-Helix Point Cloud (HHPC) datasets for 360 subsurface inspection. Inspection focus is on hidden shaft detection in Kirton Tunnel (UK), for which successful hallmarking of all 8x shafts and anticipated topographical strata is achieved. Development opportunity towards 3D volumetric reconstruction of subsurface structural defects in HHPC datasets is further discussed, alongside merger with LiDAR-based surface profiles, as a potential practical framework for an effective future virtual inspection management platform for Network Rail.
Short Quote: ‘I am eager to see where the continued development of hybrid rotational subsurface inspection radar visualisations will lead for the Rail sector and wider infrastructure applications. Married with surface-level dataset fusion, opportunity to be a part of developing Virtual Reality structural surveys for broader data accessibility is a particularly exciting prospect!’
Second Prize: AI Applications for Railway Positioning and Autonomous Trains by Benjamin Smakic
 Name: Benjamin Smakic
Name: Benjamin Smakic
Position/Role: Railway signalling engineer at Sweco (Swedish Consultants)
Affiliation: KTH University of Technology (Sweden)| School of architecture and the built environment
Coordinator(s): Anders Lindahl, Emil Jansson, Hans Sipilä, Mikael Cederlund
Email: benjamin.smakic@gmail.com
Linked In: https://www.linkedin.com/in/benjamin-smakic-7412a2148/

Submitted Work: AI Applications for Railway Positioning and Autonomous Trains
Placed: Second Prize
Short Summary: The Swedish railway network is reaching its maximum capacity on many important passenger and freight lines. Building only new tracks is expensive and funded by tax money, therefore, it is of immense value to increase the utilization of all existing tracks. This thesis aims at investigating how Computer Vision, a type of Artificial Intelligence (AI), can be used as a complement to ERTMS. The concept is to use front-facing, train-mounted, track-recording cameras together with Computer Vision to determine the number of tracks and track occupancy of the train. Since GPS is not always reliable, it is not suitable for train positioning. If, however, it is complemented with an AI-based and camera-based positioning system, GPS can be used for ERTMS level 3 and moving block, increasing the capacity on the railway lines dramatically. Furthermore, it can be developed to facilitate autonomous passenger, freight and shunting trains. This can be done by creating a Computer Vision model which recognizes switches, signs, signals and other rail-vehicles.
Short Quote: ‘The field of autonomous road vehicles is undergoing a huge technological advancement. Today is the perfect opportunity to launch the equivalent large-scale digitalization of the railway network, especially in conjunction with upcoming expansions of the Swedish railway network and potentially a high-speed rail network. The railway system cannot fall behind; it is time to make railway great again.’
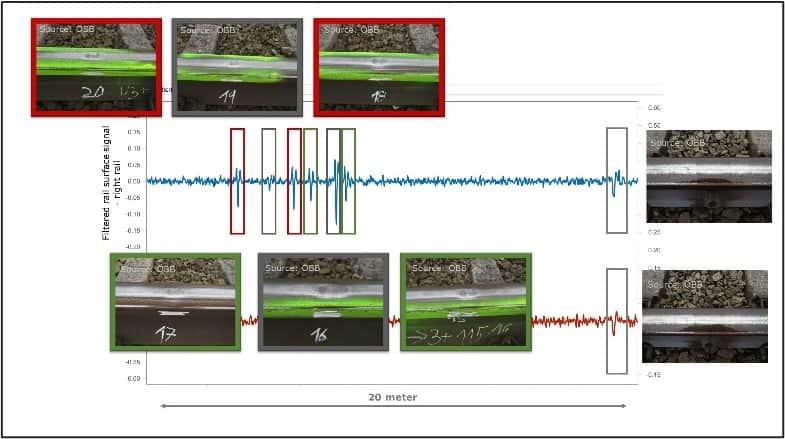
Third Prize: The Detection of Squats (Rail Defects) Using Existing Data Sources by Markus Loidolt
 Name: Markus Loidolt
Name: Markus Loidolt
Position/Role: University Assistant / Phd-student
Affiliation: Graz University of Technology (Austria) | Institute of Railway Engineering and Transport Economy
Coordinator(s): Stefan Marschnig, Peter Veit
Email: markus.loidolt@tugraz.at
Linked In: https://www.linkedin.com/in/markus-loidolt-1a5282193/
OCRID: https://orcid.org/0000-0003-3432-5797
 Submitted Work: The Detection of Squats (Rail Defects) Using Existing Data Sources
Submitted Work: The Detection of Squats (Rail Defects) Using Existing Data Sources
Placed: Third Prize
Short Summary: Increasing numbers of trains, higher speeds and increased axle loads lead to higher stress on the infrastructure and reduce available time slots for maintaining actions at the same time. Due to the increasing traction performance of powered axles coming along with this development, increased rail fatigue is to be expected and, in many cases, already observed today. One type of rolling contact fatigue damage has gained prominence in the recent years in many countries: squats. Untreated squats pose a risk of rail breakage due to vertical cracks. In addition, the typical indentations of the rail surface can lead to increased dynamic load inputs into the system. Detected early enough, squats can be removed relatively easily using common rail surface treatment such as grinding or milling. However, detected too late, the only option is to exchange rails, coming along with both, high replacement costs and extra costs of track unavailability. Therefore, the aim of this work is to examine the potential for squat detection of existing data measured by the rail surface measuring system of OeBB’s measuring car. It turns out that, with appropriate data processing, this data source is indeed suitable for the detection of squats. Currently, we evaluate details on false positive and false negative rates.
Short Quote: ’The modal shift to rail is highly desirable, but also brings many challenges for the rail system that we need to work on together. I am happy to be able to make a small contribution through my research.’